

Currently, in the decommissioning activities in nuclear facilities, an identification and radiological characterization of the areas or elements that may be radioactively contaminated is carried out, in order to decontaminate them afterwards. This operation is carried out manually, therefore, the measurements are sensitive to human factors, and also requires long stays of the staff under radioactive environments. This operation has been identified as being susceptible of being improved and automated, so as to reduce the exposure of the inspectors to radioactive environments and, on the other hand, to achieve a lower variability and greater reliability of the measurements with a greater automation of the process.
ENUSA is currently developing a mobile climbing robot, RODESMIN, with the goal of being able to incorporate different detectors for carrying out an inspection and radiological characterization of different walls, either indoors and/or outdoors.
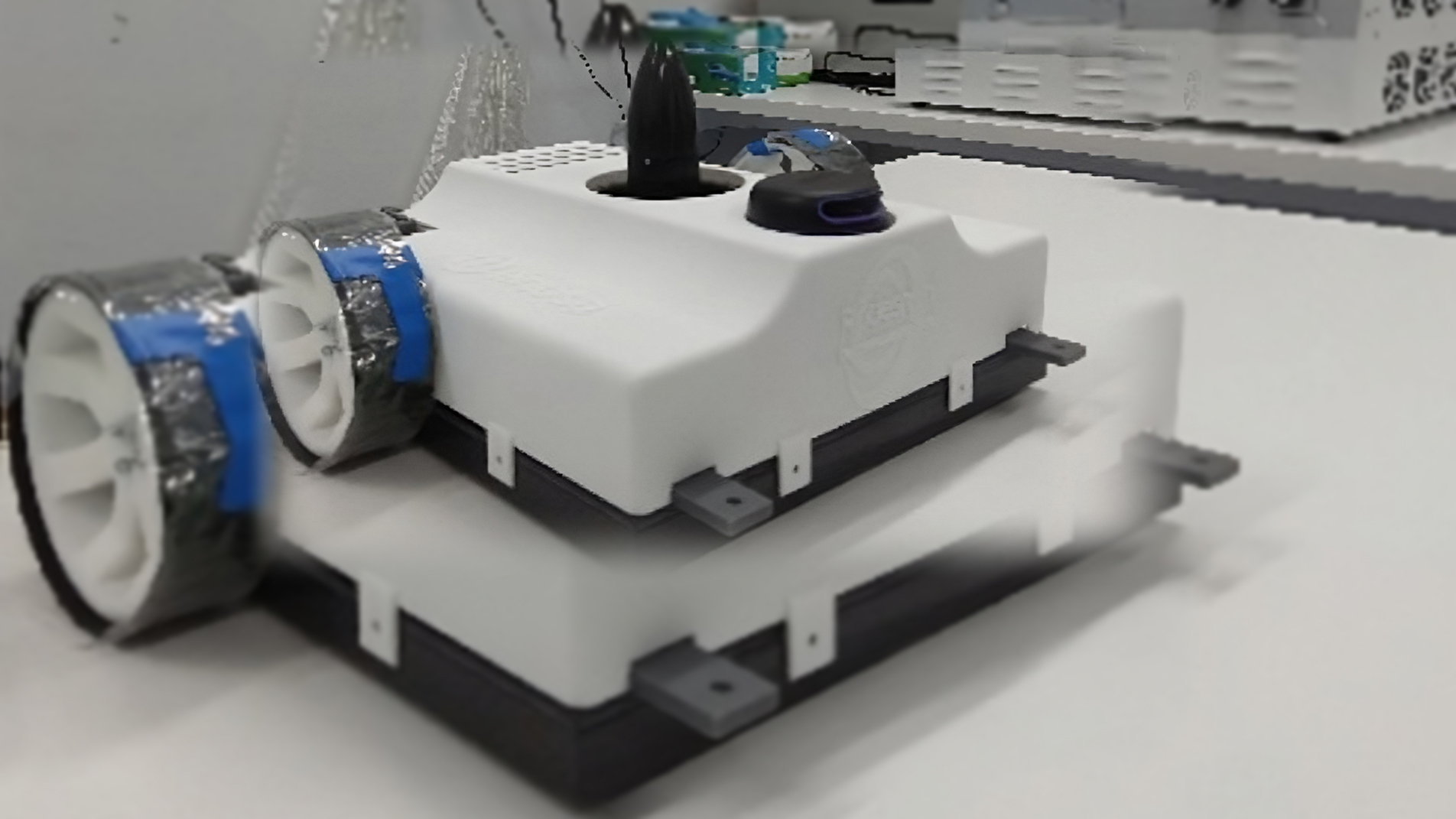
Many mechanical architectures in mobile robots are proposed from the academic and industrial world. The RODESMIN unit being developed is a mobile robot with a wheeled locomotion system, consisting of two drive wheels plus a free wheel, achieving a differential movement system. It has the ability to stay attached and move on the surface of a wall in a durable and stable way. The walls can have different inclinations with respect to the floor, but the design of the robot even allows it to adhere and to move along ceilings. To adhere to the surface, a technique has been selected based on generating a vacuum between the robot and the surface by using a turbine, creating a pressure difference that keeps it adhered.
On the other hand, the robot is equipped with the necessary hardware and software to operate either manually, remote-controlled by an operator, or automatically, following a predetermined trajectory or heading to a previously established point.
The robot has the capacity to carry a detector to measure radiation on the surfaces over which it moves. From the measured data, and correlated with the position of each point where they are recorded, a radiation map is generated where the spatial distribution of the different radioisotopes that can be found, in a representation in a range of colors according to the level of radiation.

